vso
人造神经刺激自主反应系统,操控机器人如臂指使
【导读】:
刺激反应系统和有意识的反应使人类能够对环境变化和外部刺激做出有效反应。本文提出了一种人造刺激-反应系统,该系统受人类意识反应的启发并能够对其进行仿真。该系统由人造视觉受体,人造突触,人造神经元电路和执行器组成。通过并入这些人造神经成分,证明了一系列有意识的反应过程,这些过程明显地缩短了反应时间,这是从反复刺激中学习的结果。拟议中的人造刺激反应系统为新的研究领域提供了希望,该研究领域将有助于神经系统疾病患者基于人造智能的器官的发展。

人造刺激反应系统。
现在有了一个简单的人造神经系统,它可以模拟人类对光的反应,因此科学家正在学习更多有关如何对该技术编程以用于医疗机器人假体的知识。
就像人的眼睛对明亮的光做出反应,手从灼热的表面或膝盖的抽搐对硬物的撞击做出反应一样,人造神经系统也可以对周围的环境做出反应。但是,这些响应是自动的。现在,研究人员寻求对人造神经元进行编程,以自觉地响应外部刺激。
到目前为止,韩国成均馆大学SKKU纳米技术先进研究所(SAINT)等三所大学联合研究团队已经成功设计出了一种能够自觉地响应外界刺激的人造系统。该系统使用一种称为光电二极管的工具将光转换为电信号,使用一种晶体管来模拟机械突触,使用一种人造神经元电路来模拟大脑和机械手。当光电二极管检测到光时,要响应的信号就好像沿着神经元的突触一样穿过晶体管,然后沿着神经元的突触行进,以提示机械手如何做出反应。
这时,科学家正在从该系统上方放下一个球,以测试人造实体如何利用光来识别运动并卷曲机械手的手指以抓住掉落的球。预期的过程模拟了人脑记录刺激(例如进入眼睛的光)然后以诸如头转等动作做出实物响应的方式。该动作源于神经元信号,该信号指导肌肉如何响应光刺激做出反应,理想情况下,所有这些操作都在几分之一秒之内完成。
1、人造刺激反应系统
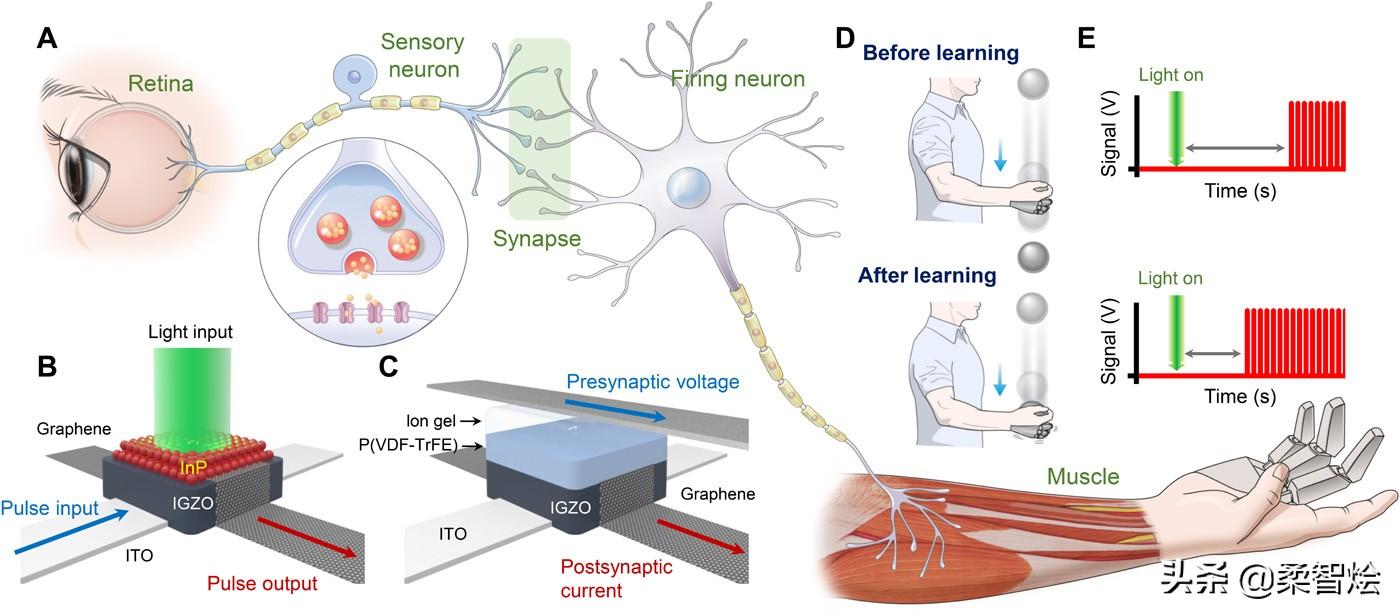
图1 人造刺激反应系统。
(A)由视网膜,神经元,突触和肌肉组成的生物刺激反应系统的示意图。(B和C)(B)具有InP QD层的AVR和(C)具有保持性EDL的AS的示意性设备结构。(D)人类通过学习成功接球的示意图。(Ë前和学习过程之后)神经信号。
图1A图中显示了生物刺激反应系统的示意图,该系统由视网膜,神经元,突触和肌肉组成。首先,视网膜检测到外部光刺激并将其转换为电信号。接下来,感觉神经元向突触发送动作电位,从而促进或抑制信号。然后,发射神经元分析并解释该信号,并将积分信号传递到肌肉。最后,肌肉执行一个动作作为响应。该响应过程类似于我们提出的人造刺激响应系统,该系统由AVR,AN电路,AS和机器人手组成。在该系统中,AVR将外部光刺激转换为电信号。接下来,感官AN电路将电信号从AVR传输到AS,进行感官输入的整合。然后,触发AN电路生成适当的响应以操作机械手。图1(B和C)分别说明了基于InP QD的AVR和基于保持性EDL的AS的垂直堆叠结构。AVR和AS均具有石墨烯/ IGZO / ITO异质结构作为基础层,可作为信号传输的平台(图S1)。注意,垂直结构提供了比常规横向装置更高的集成密度。AVR中的InP QD层涂覆在石墨烯上,并且该层通过光闸效应将光刺激转换为电信号。用于AS的制造,聚(偏二氟乙烯-三氟乙烯)[P(VDF-TrFE)的重复]和离子凝胶{聚体的混合物(偏二氟共(六氟丙烯)[P(VDF-HFP)]和1-乙基-3-甲基咪唑鎓双(三氟甲基磺酰基)酰亚胺([EMIM] [TFSI])离子液体)包被以形成保持性EDL,该EDL通过控制学习过程。使用上述AVR,AS电路,AN电路和机械手可以促进有意识的反应中的突触连接。图1D描绘了学习过程,其中,通过学习,人类能够成功地捕捉到在提供光刺激后立即开始掉落的球。这种成功的捕获归因于学习后增强的突触连接,因此响应速度更快。图1E显示了学习过程之前和之后的神经信号。照明开始与脉冲串的产生之间的时间间隔的减小表明响应时间缩短,这与图1D所示的结果一致。
2、具有保持性EDL的AS的电学性能
保持性的基于EDL的AS受刺激-响应系统中的生物突触的启发(图2A)。生物突触将动作电位从突触前末端转移到突触后末端。突触前突触输入(有意识的决定)可以调节有意识反应中的突触连接,这会引起突触后信号的变化)。突触后信号根据突触连接的维持程度显示出不同的趋势。短期可塑性(STP)是通过施加单个尖峰或偶发尖峰来临时增加或暂时减小突触连接来实现的。相反,施加重复的突触前突触会导致突触连接的长期变化。
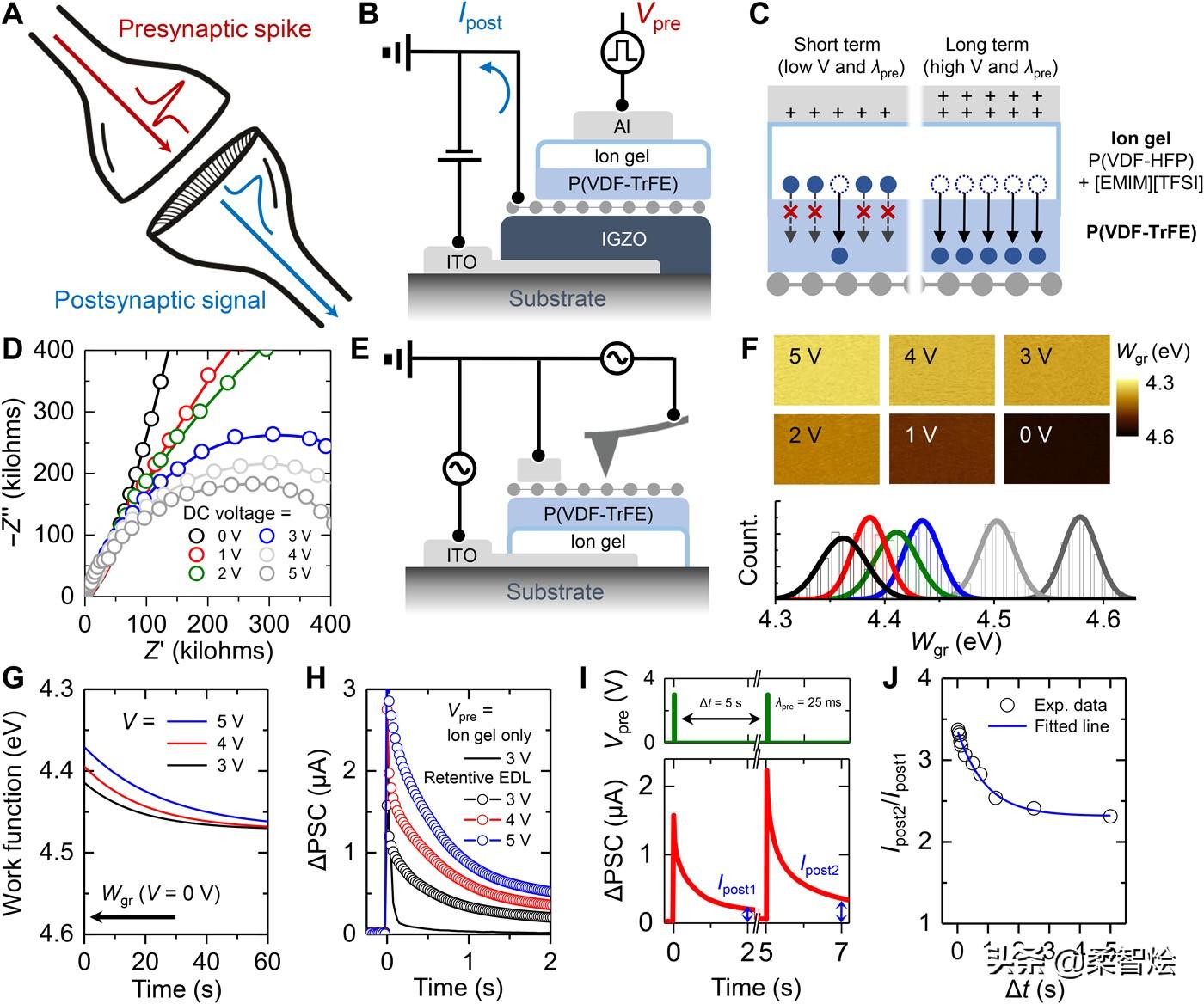
图2 具有保持性EDL的AS的电性能。
(A)示意图的刺激反应系统中的生物突触。(B)基于垂直堆叠的石墨烯/ IGZO / ITO异质结构和保持性EDL的AS的横截面示意图。(C)Al /保持性EDL /石墨烯异质结构示意图,描述了AS的工作机理。(D)不同电压下保持性EDL的奈奎斯特图。(E)开尔文探针力显微镜(KPFM)测量设置的示意图。(F)在不同电压下的W gr的KPFM图像和直方图。(G)由KPFM在各种电压下确定的W gr的保持特性。(高)比较两种不同栅极介电层(仅离子凝胶和保持性EDL)的突触后电流(PSC)行为。(I)由两个V预脉冲触发的PSC ,时间间隔为Δt。I post1和I post2分别是施加第一个脉冲和第二个(连续)脉冲后2 s时增加的PSC值。
3、具有AS电路和AN电路的人造神经系统
为了完全实现信号传输系统,需要能够在AS中处理增强信号的触发组件。因此,设计了一种能够分析和解释该信号的AN电路。图3A示出了将AS和AN电路结合到人造神经系统中。旨在放大弱AS信号的AS电路由AS和同相放大器(×10 3)组成。AN电路由电阻器(RC)电路和同相比较器组成,以模拟泄漏的积分生火(LIF)神经元模型。LIF模型指出,神经元动作电位(V NO)是由突触输出电压(VSO)。在AN电路中,通过RC电路会发生泄漏积累,并导致比较器产生V NO。图3B详细示出了信号传输过程。首先,将V pre脉冲序列应用于AS,随后将其转换为I post。接下来,我将信号流注入同相放大器以放大输入信号,然后将其转换为V SO。在AN电路中,V SO通过RC电路的充电和放电转换为神经元输入电压(V NI)。应当指出的是由于AS的STP和LTP行为,V NI显示出具有峰值和谷值的泄漏积分。最后,将V NI传送至比较器以确定其是否超过阈值电压。当累积的V NI低于设定电压(V set)时,比较器输出-V CC作为V NO。相反,如果V NI高于V set,则比较器输出+ V CC作为V NO。因此,可以产生V NO。通过将V设置为适当的值来形成脉冲序列,这在LIF模型中称为触发过程。
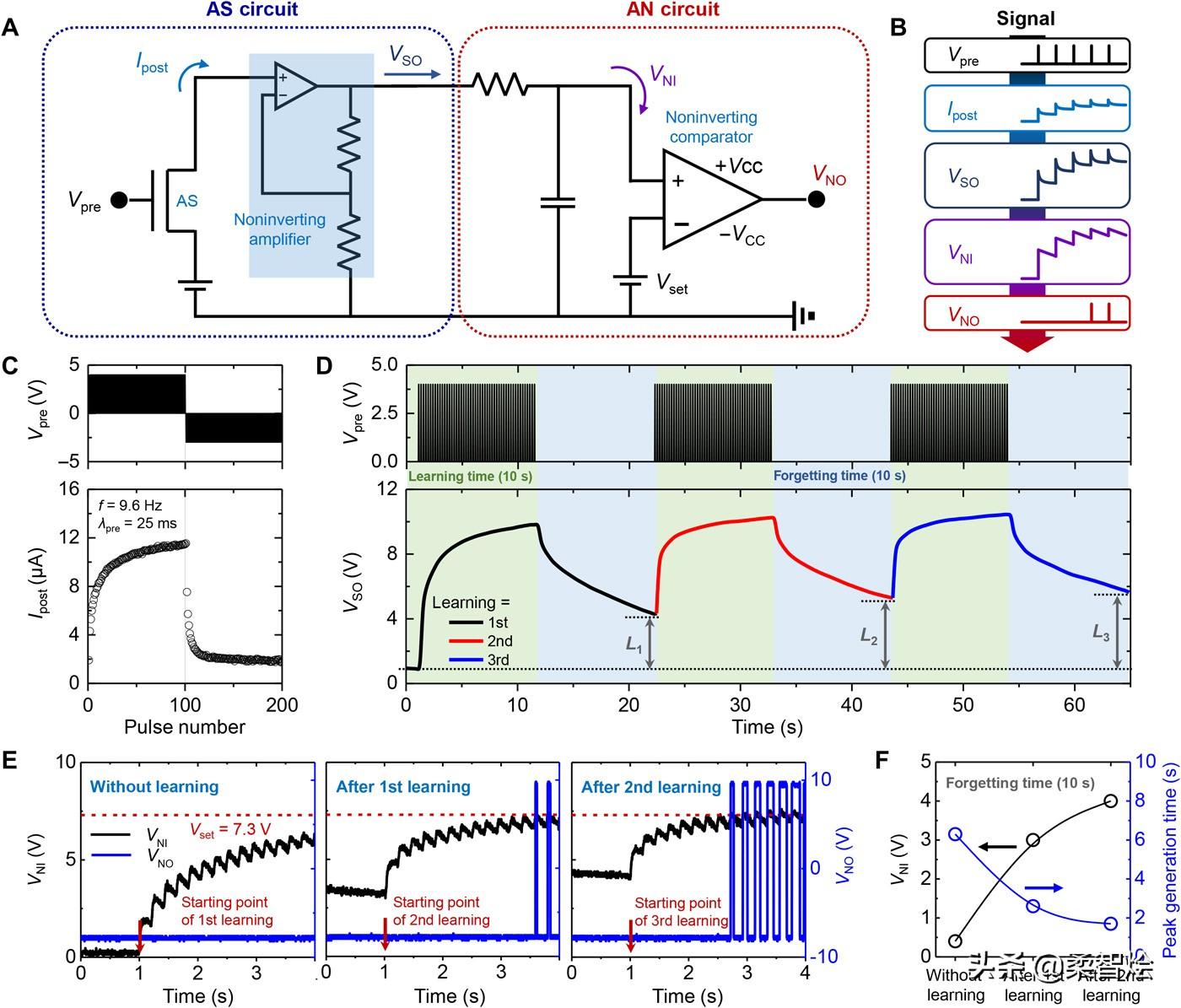
图3 带有AS电路和AN电路的人造神经系统。
(A)结合有AS电路和AN电路的人造神经系统的电路图。(B)人造神经系统中的信号传递过程。(C)通过施加连续的V预脉冲引起的AS的LTP / LTD特性。(D)AS电路的学习过程,包括施加正V个预脉冲(即学习周期)和遗忘周期(每个10 s)交替进行。将L 1,L 2和L 3定义为V SO。从初始状态的值增加到每个遗忘时间10 s之后的值。(E)AS电路的迭代学习过程。(F)针对不同学习过程(即,没有学习,在第一次学习过程之后和在第二次学习过程之后)的V NI和峰值生成时间的图。
4、模拟人类意识反应的人造刺激反应系统
最后,构建了人造刺激-反应系统,以作为其模拟人类意识反应的概念的证明。刺激及其响应的设置如图1D所示:学习过程使机器人手在识别到视觉信号后立即执行抓握动作。图4A示出了所构造的系统的示意图,该系统包括AVR,感觉AN电路,AS电路,触发AN电路和致动器。刺激响应过程始于吸收可见光,然后通过AVR将刺激转换为电脉冲。在此,入射的可见光和AVR被认为分别对应于生物刺激响应系统中的视觉刺激和感觉受体。
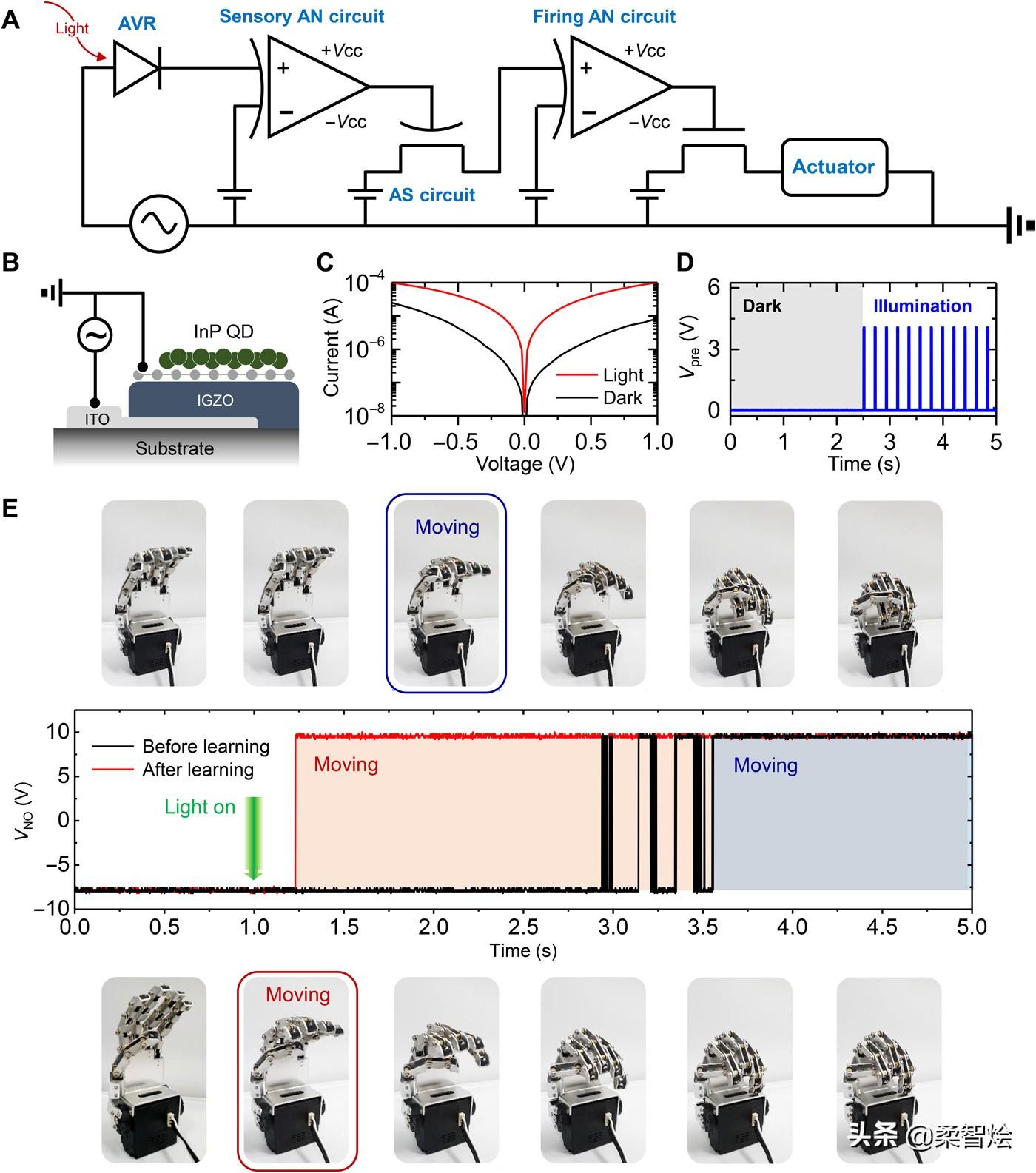
图4 模仿人类意识反应的人造刺激反应系统。
(A)具有AVR,感觉AN电路,AS电路,触发AN电路和致动器的人造刺激-响应系统的电路图。(B)具有垂直堆叠的石墨烯/ IGZO / ITO异质结构的AVR的截面示意图。(C)在黑暗和光照条件下(50μW,520 nm)的AVR的电流-电压特性。(D)在黑暗和光照条件下,由AVR和传感AN电路产生的V pre的动态响应。(E)机器人手和V NO的实时摄影图像学习前后从触发AN电路触发的信号。照片提供:S. Kim [成均馆大学SKKU纳米技术高级研究所(SAINT)]。
总结:
设计了一个人造刺激-响应系统,该系统使用AVR,AS,AN电路和机械手成功模仿了人类的意识响应。将InP QD和保持性EDL涂覆在垂直堆叠的石墨烯/ IGZO / ITO异质结构的顶部,该异质结构用作基础层,分别实现AVR和AS。另外,使用RC电路和比较器来构造感官和触发AN电路。人造刺激-反应系统的这些组件被电气集成以诱导有意识的反应。AVR和感官AN电路将入射光信号转换为电脉冲信号。然后,通过控制保持性EDL中的离子运动,将脉冲信号传递到AS并调节突触连接。然后,突触后信号进入触发AN电路。在学习过程的几次迭代之后,突触后信号保持在一定的阈值水平之上,其结果是机械手响应于光刺激而更快地移动。所提出的能够自觉响应的人造刺激-响应系统为人造智能机器人系统的研究提供了新的见识。
展望:
自从这项实验于2018年开始以来,研究人员已经报告了杯装其机器人手的人造神经系统所需的时间从2.56秒减少到0.23秒。科学家指出,该项目的主要目标是帮助遭受神经系统损伤的患者重新控制其肌肉运动。到目前为止,类似的实验设法使用这种人造系统来控制蟑螂的肢体运动。研究旨在进一步开发这些系统,以提高对人类的机器人协助的潜力。
此外,除了协助人类发挥辅助作用外,这种机器人技术还有望为受雇于自己执行任务的更多独立机器人实体提供希望。
参考资料:能够自觉反应的人造刺激反应系统,Science Advances(2021)。DOI:10.1126 / sciadv.abe3996